極座標変換パラメータ構造クラス
Namespace: FVIL.PolarTransAssembly: FVILbasic (in FVILbasic.dll) Version: 3.1.0.0 (3.1.0.17)
 Syntax
Syntax
| C# |
|---|
[SerializableAttribute] public class CFviPolarTransParam : CFviDataObject |
| Visual Basic |
|---|
<SerializableAttribute> Public Class CFviPolarTransParam Inherits CFviDataObject |
Remarks
極座標変換の実行時に指定するパラメータを保有します。
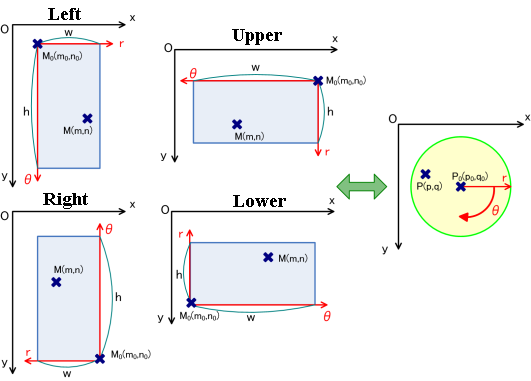
下図に、このクラスが保有するパラメータの対応関係を示します。
左が入力側、右が出力側とします。coordinate_mode は Left を指定しているものとします。
本体のクラスが持つ『変換方向の反転フラグ』によって、入力と出力の意味は反転します。
- 変換方向が正方向の時 (Invert = false)
矩形(origin_in)から円形(origin_out)に変換します。 この場合は、入力画像に矩形状の画像があり、円形に変換したものを出力画像へ格納する事を意味します。
- 変換方向が逆方向の時 (Invert = true)
円形(origin_out)から矩形(origin_in)に変換します。 この場合は、入力画像に円形状の画像があり、矩形に変換したものを出力画像へ格納する事を意味します。
![]()
| 項目 | プロパティ | 意味 | 変換方向との関係 |
|---|---|---|---|
| origin_in | OriginIn | 矩形領域の基準座標 | 正方向(Invert = false)の時は、処理対象領域を意味します。 逆方向(Invert = true)の時は、出力領域を意味します。 |
| width | Width | 矩形領域の幅 | 〃 |
| height | Height | 矩形領域の高さ | 〃 |
| origin_out | OriginOut | 円形領域の回転中心座標 | 正方向(Invert = false)の時は、出力領域を意味します。 逆方向(Invert = true)の時は、処理対象領域を意味します。 |
| radius | Radius | 円形領域の半径 | 〃 |
| start_angle | StartAngle | 円形領域の回転開始角度 | 〃 |
| range_angle | RangeAngle | 円形領域の回転範囲 | 〃 |
| coordinate_mode | CoordinateMode | 矩形領域の基準座標モード | 正方向(Invert = false)の時は、処理対象領域を意味します。 逆方向(Invert = true)の時は、出力領域を意味します。 |
基準座標モード:
このクラスの CoordinateMode プロパティで処理対象画像の基準位置を指定できます。
基準座標モードによって、矩形領域の基準位置と円形領域の対応位置が変化します。
下表に各モードにおける対応関係を示します。
※注)
逆変換(Invert = true)の時は、
処理対象領域と出力領域の意味は反転しますが、各パラメータの対応関係は変わりません。
|
基準座標モード CoordinateMode |
回転方向 RangeAngle |
円中心 OriginOut |
円半径 Radius |
|---|---|---|---|
| Left | Height | OriginIn | Width |
| Right | Height | OriginIn | Width |
| Upper | Width | OriginIn | Height |
| Lower | Width | OriginIn | Height |
初期値と範囲:
| プロパティ | 初期値 | 範囲 |
|---|---|---|
| OriginIn | 0,0 | 入力画像の左上を 0,0 とする任意の座標 |
| Width | 640 | 0~ (ピクセル) |
| Height | 480 | 0~ (ピクセル) |
| OriginOut | 0,320 | 出力画像の左上を 0,0 とする任意の座標 |
| Radius | 320 | 0~ (ピクセル) |
| StartAngle | 270 | 0≦angle<360 (Degree 単位) |
| RangeAngle | 180 | -360≦angle≦360 (Degree 単位) |
| CoordinateMode | Left | CoordinateMode に定義された定数 |
Inheritance Hierarchy
System..::..Object
FVIL..::..CFviObject
FVIL.Data..::..CFviDataObject
FVIL.PolarTrans..::..CFviPolarTransParam
FVIL..::..CFviObject
FVIL.Data..::..CFviDataObject
FVIL.PolarTrans..::..CFviPolarTransParam